Centro de Aplicações: Exemplos nas áreas de Engenharia de Projetos de Aviões e Naves Espaciais
Trem de Pouso de Aeronaves - Teste de Impacto
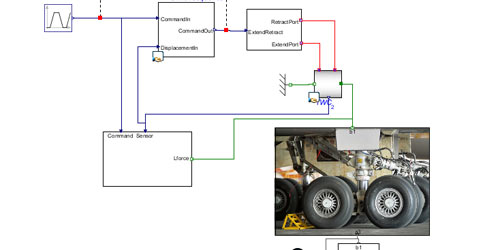
Este é um modelo simplificado de um trem de pouso de aeronaves comerciais. Trata-se de um modelo de mecanismos do trem de pouso com múltiplos corpos, incluindo um "bogie" das quatro rodas com modelos de pneus lineares. O mecanismo é acionado através de um circuito hidráulico, com a engrenagem "travada" em posições fixas ou retraídas, usando travas mecânicas. O modelo não é baseado em qualquer aeronave específica: destina-se a ser utilizados para demonstrar os princípios da modelação de um sistema deste tipo e pode ser utilizado como um ponto de partida para os projetos mais específicos.
Esta versão do modelo é executada através de um teste de "recolher e soltar" para estudar as forças no pneu e nas articulações no momento do impacto
Trem de Pouso de Aeronaves - Implantar/Recolher
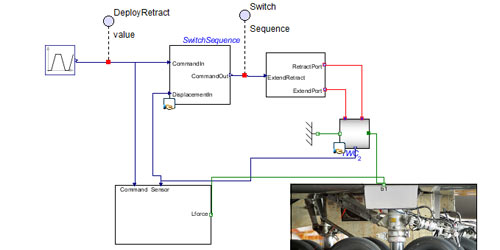
Este é um modelo simplificado de um trem de pouso de aeronaves comerciais. Trata-se de um modelo de mecanismos do trem de pouso com múltiplos corpos, incluindo um "bogie" das quatro rodas com modelos de pneus lineares. O mecanismo é acionado através de um circuito hidráulico, com a engrenagem "travada" em posições fixas ou retraídas, usando travas mecânicas. O modelo não é baseado em qualquer aeronave específica: destina-se a ser utilizados para demonstrar os princípios da modelação de um sistema deste tipo e pode ser utilizado como um ponto de partida para os projetos mais específicos.
Esta versão do modelo é executado através de um ciclo de "implantar e retrair" o trem de pouso e examinar as forças necessárias para o acionamento, e as dimensões dos componentes hidráulicos, portanto, para alcançá-lo dentro das especificações do projeto.
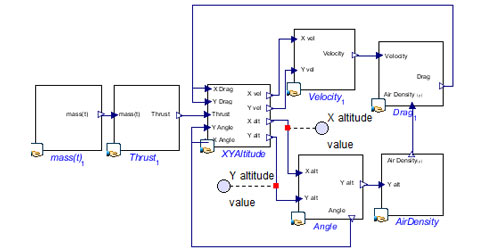
Avaliação da Precisão de Trajetória de um Foguete no Espaço
Como o objetivo de um foguete é chegar a um ponto de destino específico em um momento e tempo específico, a compreensão da trajetória que um foguete vai seguir é um aspecto essencial no projeto do foguete. Se você está lançando um satélite para o espaço ou iluminando o céu da noite com fogos de artifício, uma trajetória exata é fundamental para assegurar que o projétil está no alvo. Infelizmente, certificando-se de que um foguete segue seu caminho calculado pode ser difícil, uma vez que as condições atmosféricas, como o vento e a chuva pode mudar radicalmente a trajetória do foguete.
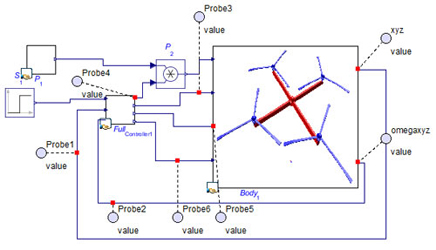
Quadricóptero - Helicóptero com 4 Rotores e Pás
Neste modelo, um helicóptero especial é modelado e seu vôo é visualizado. As forças e binários no corpo do subsistema são criados por quatro rotores, cada um acionado por um motor elétrico de corrente contínua. A sustentação e o arrasto de cada rotor de pás, são calculados a partir da velocidade angular. Um subsistema de controlador é utilizado para manter a altitude do quadricóptero, a uma altura de referência de 50 metros. Uma falha de um segundo é simulado na segunda marca de 20m, a fim de criar uma perturbação, como pode ser visto na simulação, o modelo estabiliza pouco tempo depois.
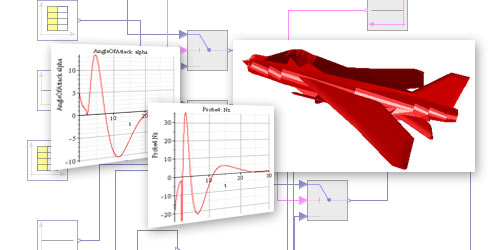
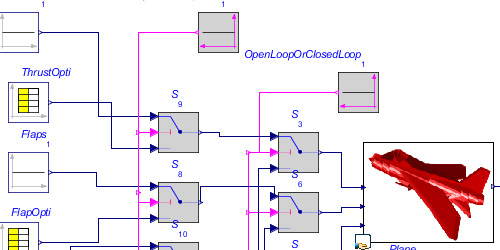
Aerodinâmica de Aeronaves
Este modelo simula a aerodinâmica de uma aeronave, incorporando o modelo do corpo da aeronave, os dados aerodinâmicos, e o projeto do controlador. O corpo da aeronave é caracterizada através de uma matriz de massa e à inércia, é conduzida através das forças aplicadas ao centro do corpo rígido da massa da estrutura. Funções não-lineares de ângulo de ataque, variações de densidade do ar, e outras mais são implementadas, com os dados da tabela de dados coletados. Os modelos em OptimalControl e ControlLQG anexados fornecem as análises e as otimizações para o projeto do controlador.
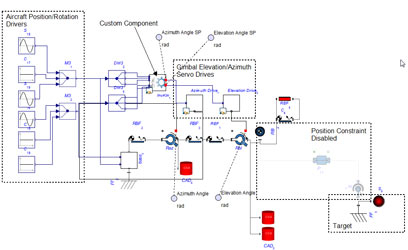
Radar de Rastreamento tipo Gimbal
Neste modelo, os ângulos de elevação e azimute necessários são determinados por um sistema de rastreamento de radar "cardan". Este problema de cinemática inversa é resolvido usando as equações da cinemática inversa, geradas pelo MapleSim. Servo-acionamentos são implementados para ajustar os parâmetros necessários do "cardan" de rastreamento.
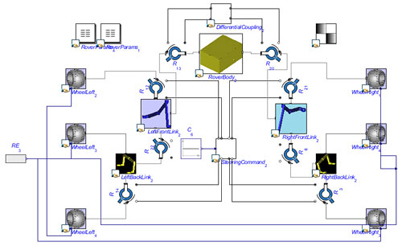
Veículo Planetário (Rover)
Um modelo de um veículo planetário para terrenos acidentados é simulado em um amplo ambiente de vários domínios. Vários comportamentos são simulados, incluindo movimento livres e aleatórios, a interação da roda como solo e o consumo de energia. Uma análise mais aprofundada é possível com os "Templates" (programa de análise e otimização, entre outros, embutidos) do Maple, permitindo a otimização da energia e planejamento de trajetória.