Modelagem e Simulação
 |
O Método de Runge-Kutta para a resolução de sistemas de Equações Diferenciais não-linearesEsta aplicação demonstra as capacidades do Maple no projeto de um sistema dinâmico e resolver o sistema de equações diferenciais não-lineares pelo método de Runge-Kutta. (Maple 12) |
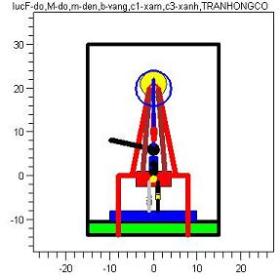
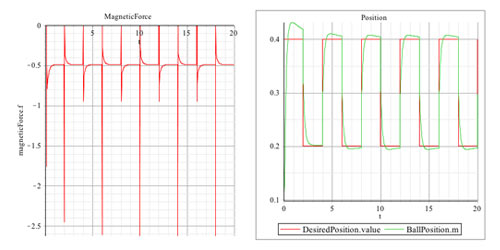
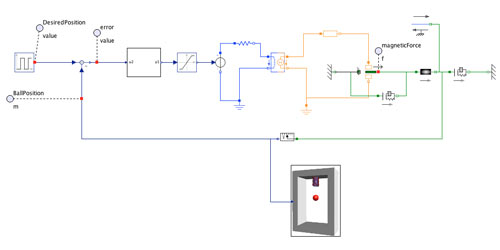
Levitação Magnética da BolaEste é um modelo físico de um sistema de levitação magnética que é usado para levitar uma esfera no ar pela força eletromagnética produzida por um bobina elétrica. A planta é colocada dentro de uma malha de controle de posição que permite controlar a bola em uma posição especificada pelo usuário . |
 |
 |
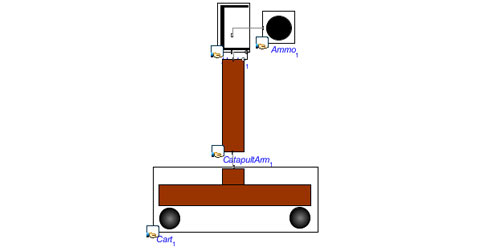
CatapultaNeste modelo está modelado uma catapulta onde L é o comprimento do braço da catapulta, M é a massa do projétil e ângulo é o ângulo a partir do braço da catapulta. |
 |
|
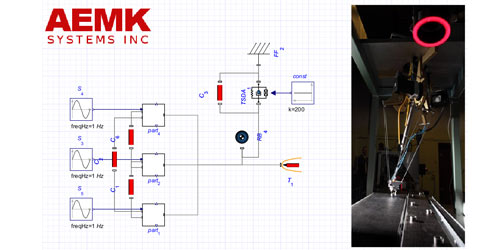
Sistemas AEMK Deltabot
Robô baseado em sistema de alta velocidade AEMK Deltabot ™ é modelado em MapleSim |
 |
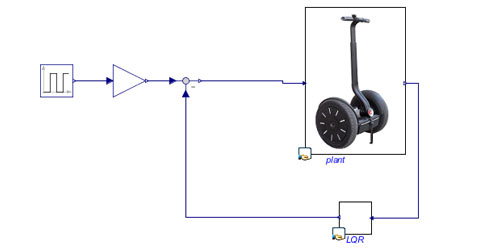
Projeto de Controle LQR para um "Segway"Neste exemplo vamos mostrar como o movimento longitudinal de um Segway pode ser controlado usando um controlador LQR. O arquivo "plant.msys" é a versão linear do modelo de planta. Este processo foi gerado utilizando o modelo de linearização ligado ao modelo. Uma vez que o sistema tenha sido linearizado, o arquivo "plant.msys" é usado pela folha de cálculo do sistema de modelo linear para criar um controlador RLQ para o modelo do projeto. |
 |
 |
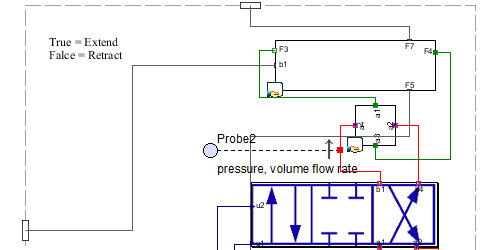
Carregador frontal
|
 |
 |
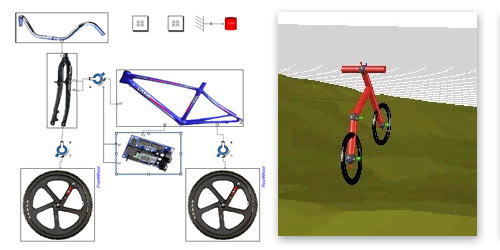
Bicicleta com Controle de Balancim, para terrenos irregulares |
 |
 |
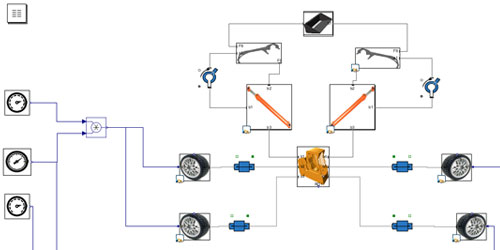
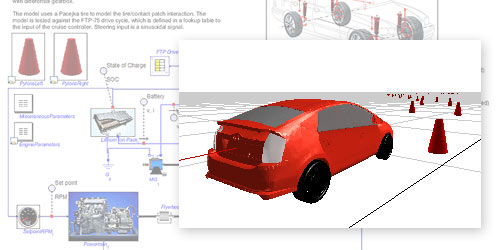
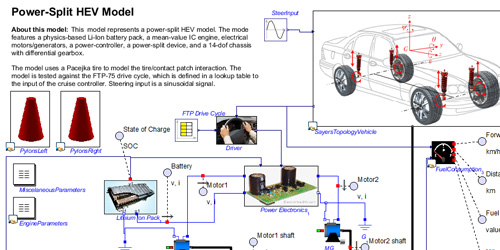
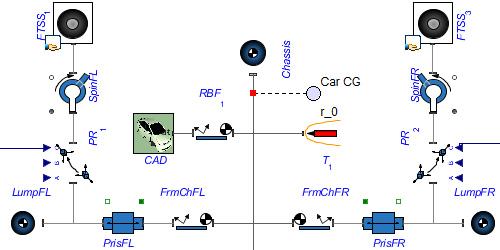
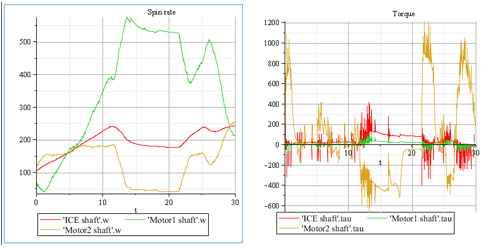
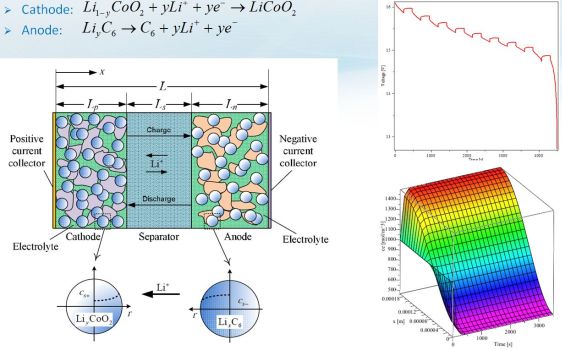
Power-Split HEV de Veículo Elétrico HibridoEste modelo representa um modelo power-split HEV. O modelo possui uma bateria Li-Ion com base na física da bateria, um motor IC (modelo significa-valor), motores elétricos/geradores, um controlador de potência, um dispositivo de power-split, e um chassi de 14 dof com caixa de velocidades, diferencial. O modelo usa um modelo de pneu Pacejka para estudar a interação do contato/pneu. O modelo é testado contra o ciclo de condução FTP-75. |
 |
 |
 |
 |
 |
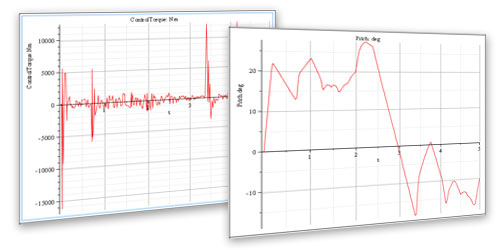
Bicicleta com Controlador de BalanceamentoEste modelo é uma bicicleta com um controlador de estabilidade de equilíbrio. A bicicleta percorre um caminho definido, e a direção é tratada pelo controlador de equilíbrio. O controlador usa informações de um giroscópio para determinar as forças de torque aplicada para a estabilidade. Este modelo usa a biblioteca de componentes de pneu do MapleSim . |
 |