 |
Estatísticas |
 |
|
Total Online: 6 Convidados: 6 Usuários: 0 |
 |
|
 |
Controle |
 |
Centro de Aplicações: Projetos nas áreas de Engenharia de Projetos de Controles
Otimizando o projeto do controlador para guiar o movimento de um trem Maglev
Trens de levitação magnética (Maglev) diferem dos trens convencionais, porque eles estão levitando nos trilhos especiais, guiado e impulsionado ao longo de um trilho por um campo magnético variável em vez de vapor, diesel ou motor elétrico. A ausência de contato direto entre o trem e o trilho permite que o trem Maglev atinja velocidades altas no transporte terrestre, competindo com os aviões comerciais.
|
 |
 |
Robô Móvel
Dado o modelo de um robô móvel de duas rodas, gostaríamos de simular a sua resposta da trajetória com várias entradas nas configurações de loop abertos e fechadas. O modelo do robô foi derivado de um exemplo de aplicação de um outro projeto intitulado Modelagem e Simulação de um robô móvel .
|
Projeto de Controle de um Motor DC
Dado um modelo de um motor DC como um conjunto de equações diferenciais, queremos obter tanto a função de transferência e do modelo de espaço de estado do sistema. Então, nós queremos usar o modelo de espaço de estado para projetar um controlador LQR e estudar o efeito do parâmetro R no projeto do controle LQR tem sobre o desempenho do sistema controlado. |
 |
Modelagem do braço do robô
Esta aplicação implementa um modelo matemático de robô baseados na transformação homogênea de Denavit e Hartenberg. A planilha deriva a matriz de D&H, e aplica-lo para o movimento de um robô "cotovelo". Uma animação do movimento do robô é incluída. |
 |
 |
Uma nova abordagem para estabilizar o caminho de reentrada de um ônibus espacial
Estabilidade e robustez são requisitos fundamentais do projeto de qualquer sistema de controle. Consequentemente, a análise da estabilidade é uma etapa vital no processo de concepção e desenvolvimento de um sistema de controle, que não só fornece informações sobre a estabilidade do sistema, ele também dá uma visão sobre as condições operacionais que afetam a estabilidade do sistema. No caso de identificar os parâmetros do controle necessários para estabilizar o caminho da reentrada de um ônibus espacial na atmosfera da Terra, a maioria dos engenheiros de controles, tipicamente aplicam uma abordagem de tentativa-e-erro da força bruta, apesar da existência de métodos avançados, como um desenvolvido por Chang e Hane, em 1989, que segue uma abordagem mais sistemática. Embora seja extremamente precisa, este método não tem vindo a ganhar popularidade devido tanto à natureza difícil das equações e a incapacidade de softwares tradicionais para resolver as equações simbólicas.
|
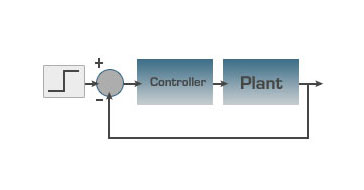
Ferramentas de Projeto de Controle
O conjunto de ferramentas para modelagem e análise de sistemas de engenharia, fornece uma ampla gama de recursos para o projeto do sistema de controle avançado. A integração que existe entre o Maple, MapleSim, e o projeto de controle no MapleSim. As ferramentas de projeto oferece aos engenheiros a capacidade de criar modelos detalhados de plantas e as ferramentas analíticas para o desenvolvimento de controladores e testes. Além disso, o engine de computação simbólica que está no cerne destas ferramentas fornecem maior flexibilidade e precisão para o seu projeto de sistemas de controle. Com essas ferramentas, os engenheiros podem reduzir drasticamente o tempo e o custo de analise, prototipagem virtual e otimização dos parâmetros de seus projetos de sistemas. |
 |
|
 |
Copyright MyCorp © 2026 |
 |
|
|