Galeria Aeroespacial
Radar Rastreamento GimbalNeste modelo, os ângulos de elevação e azimute necessários são determinados por um sistema de rastreamento de cardan radar. Este problema de cinemática inversa é resolvido usando as equações de cinemática inversa geradas pelo MapleSim. Servo-accionamentos são implementados para ajustar os parâmetros necessários do cardan de rastreamento. |  |
Planetary RoverUm modelo de um rover planetária em terrenos acidentados é simulada em um amplo ambiente de vários domínios. Vários comportamentos são simuladas, incluindo movimento vagabundo, interacção roda / solo e consumo de energia.Uma análise mais aprofundada é possível em Maple, permitindo a otimização de energia e planejamento de trajetória. |  |
QuadrocopterNeste modelo, um quadrocopter é modelado e seu vôo é visualizado. As forças e binários no subsistema de corpo são criados por quatro rotores, cada um accionado por um motor de corrente contínua. A sustentação e arrasto de cada rotor são computados a partir da velocidade angular. Um subsistema de controlador é utilizado para manter a altitude do quadrocopter a uma referência de 50 m. Uma falha de um segundo é simulado na segunda marca de 20, a fim de criar uma perturbação, e como pode ser visto na simulação, o modelo estabiliza pouco tempo depois. | 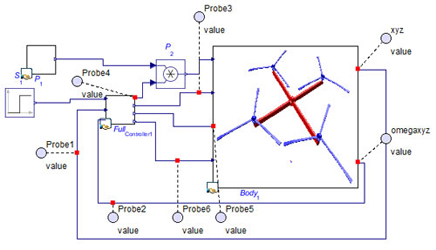 |