 |
Estatísticas |
 |
|
Total Online: 5 Convidados: 5 Usuários: 0 |
 |
|
 |
Galeria de Controladores |
 |
HexapodThis model uses multibody components to simulate the walking motion of a hexapod robot. Leg actuation is provided with trapezoidal signals. Normal forces, friction, and deflections are calculated for each "foot" of the hexapod.
A 3-D visualization demonstrates the prescribed walking motion. |  |
Escolha e Coloque RobotNeste modelo, uma picareta e lugar robô móvel é simulado. O efetuador é uma mão de dedos de quatro onde o contato entre cada dedo ea bola é modelado como um "ponto a ponto" contato. | 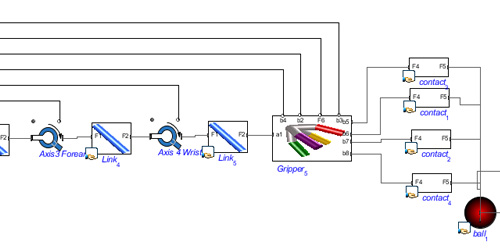 |
EscavadoraEste é um modelo cinemático básico para uma escavadeira. A saída da simulação ilustra o limite de alcance do balde e uma animação 3D ilustra o movimento da escavadora em operação. Este é um modelo básico que pode ser estendido para realizar o desenvolvimento do projeto, verificação de segurança e análise de desempenho. | 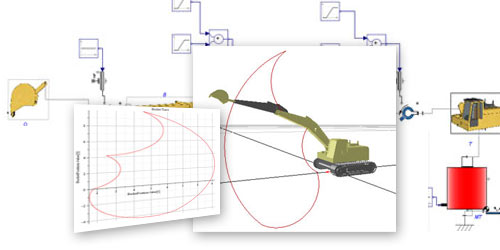 |
|
 |
Copyright MyCorp © 2026 |
 |
|
|