 |
Estatísticas |
 |
|
Total Online: 16 Convidados: 16 Usuários: 0 |
 |
|
 |
Galeria de Controladores |
 |
HexapodThis model uses multibody components to simulate the walking motion of a hexapod robot. Leg actuation is provided with trapezoidal signals. Normal forces, friction, and deflections are calculated for each "foot" of the hexapod.
A 3-D visualization demonstrates the prescribed walking motion. |  |
Escolha e Coloque RobotNeste modelo, uma picareta e lugar robô móvel é simulado. O efetuador é uma mão de dedos de quatro onde o contato entre cada dedo ea bola é modelado como um "ponto a ponto" contato. | 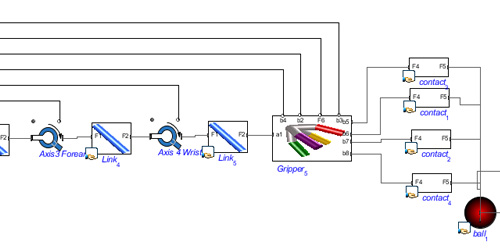 |
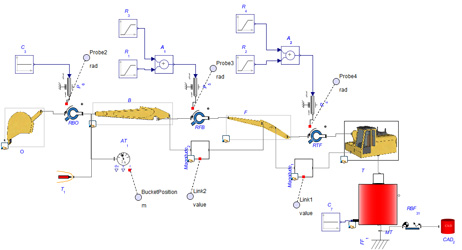
EscavadoraEste é um modelo cinemático básico para uma escavadeira. A saída da simulação ilustra o limite de alcance do balde e uma animação 3D ilustra o movimento da escavadora em operação. Este é um modelo básico que pode ser estendido para realizar o desenvolvimento do projeto, verificação de segurança e análise de desempenho. | 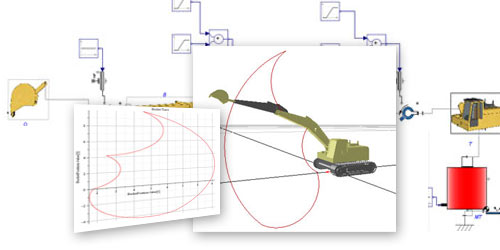 |
Escavadeira Hidráulica Modelo com ModelonEste é um modelo de uma escavadeira que foi criado usando uma combinação de biblioteca multicorpos do MapleSim e biblioteca hidráulico do Modelon . O movimento e as funções da escavadora hidráulica são realizadas através da utilização de cilindros diferenciais que são usadas para converter o fluxo hidráulico para o movimento de translação. Os sinais de entrada são fornecidos para a válvula direccional de cada um dos circuitos hidráulicos para sinalizar uma extensão ou retracção movimento. No caso de uma máquina escavadora, uma situação de carga fugitivo pode ocorrer quando a válvula direccional desloca para recolher ou expandir um cilindro hidráulico e o peso da carga força o actuador de se mover mais rápido do que o caudal da bomba. Uma válvula de contrapeso foi adicionado para o circuito hidráulico para controlar esta carga fugitivo. |  |  |  |
|
 |
Copyright MyCorp © 2026 |
 |
|
|